
VR Teleoperation: Franka Arm + FPV PTZ Camera

Project Information
- Category: Teleoperation · VR · Robot Arm
- Role: Developer · Teleoperation Pipeline
- Date: 2025
VR Teleoperation: Franka Arm + FPV PTZ Camera
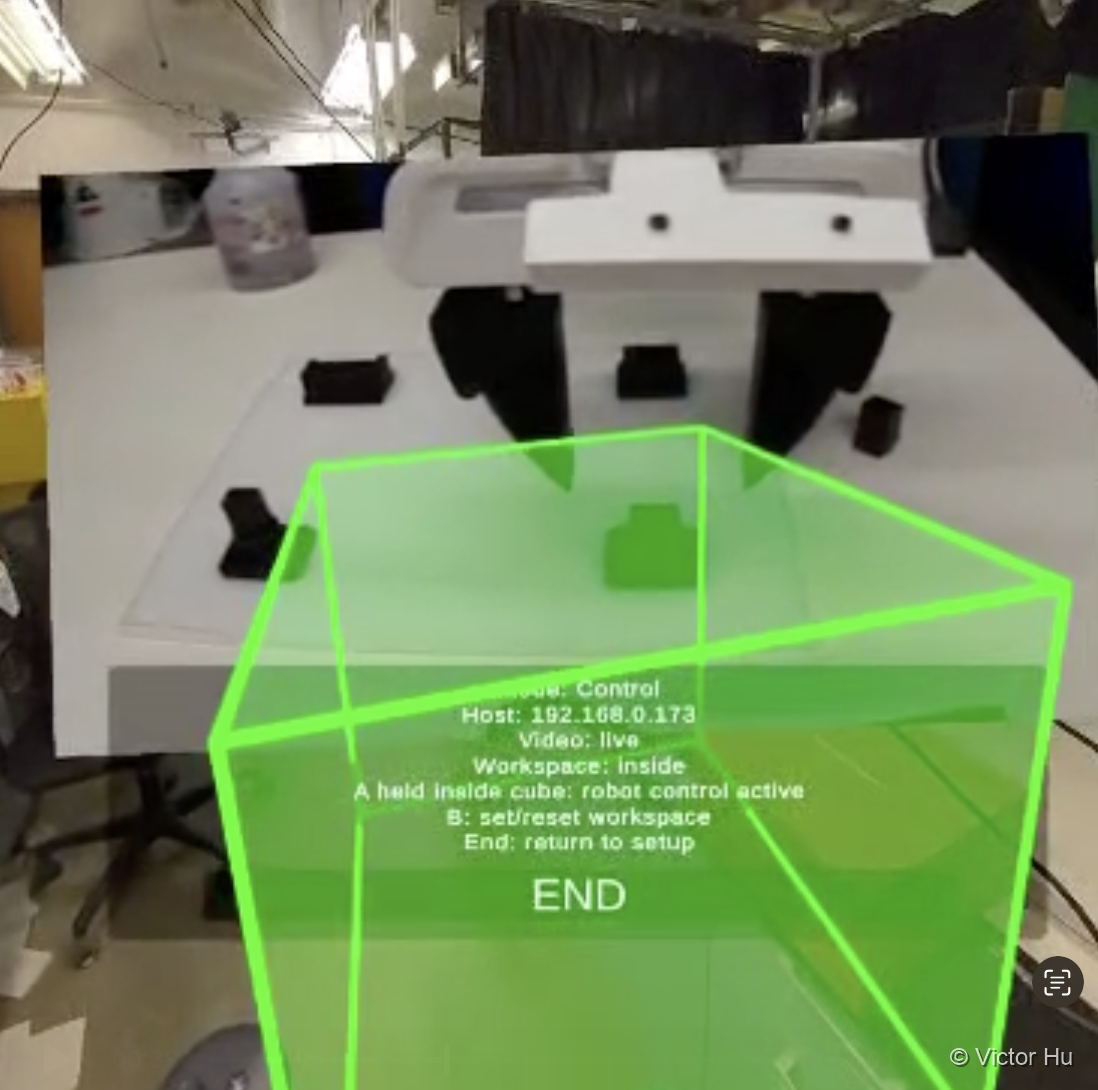
This project turns a VR headset into a natural teleoperation interface. Head motion drives a pan-tilt-zoom (PTZ) camera while its video streams back into a Meta Quest 3, so the operator looks around the robot’s workspace as if standing inside it, a true first-person view.
On top of the camera link I integrated a Franka Emika Panda arm, letting the operator command the manipulator through the same headset. The control pipeline was tuned to keep motion-to-photon latency low enough for the mapping to feel direct rather than laggy.
Because teleoperation puts a real arm under human control, I added explicit workspace safety bounds that constrain commanded motion to a safe region, the kind of guardrail that makes a teleop rig usable for real data collection and demonstration rather than just a demo.
Highlights
- Mapped VR headset pose to camera pan/tilt motor commands with low latency
- Streamed the live feed into Meta Quest 3 for an immersive first-person view (FPV)
- Teleoperated a Franka Emika Panda arm with the headset for intuitive control
- Defined workspace safety bounds to keep teleoperation within safe limits