
Autonomous Ball-Shooting Mechatronic Robot

Project Information
- Category: Mechatronics · Control · FSM
- Role: System Integration Lead
- Date: 2023
Autonomous Ball-Shooting Mechatronic Robot
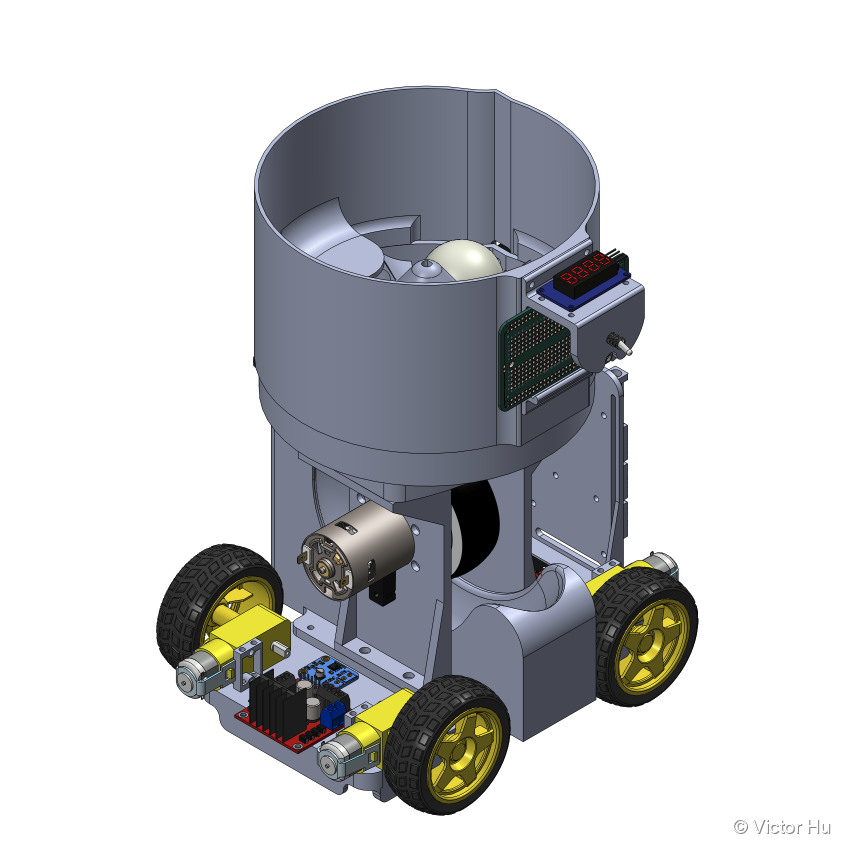
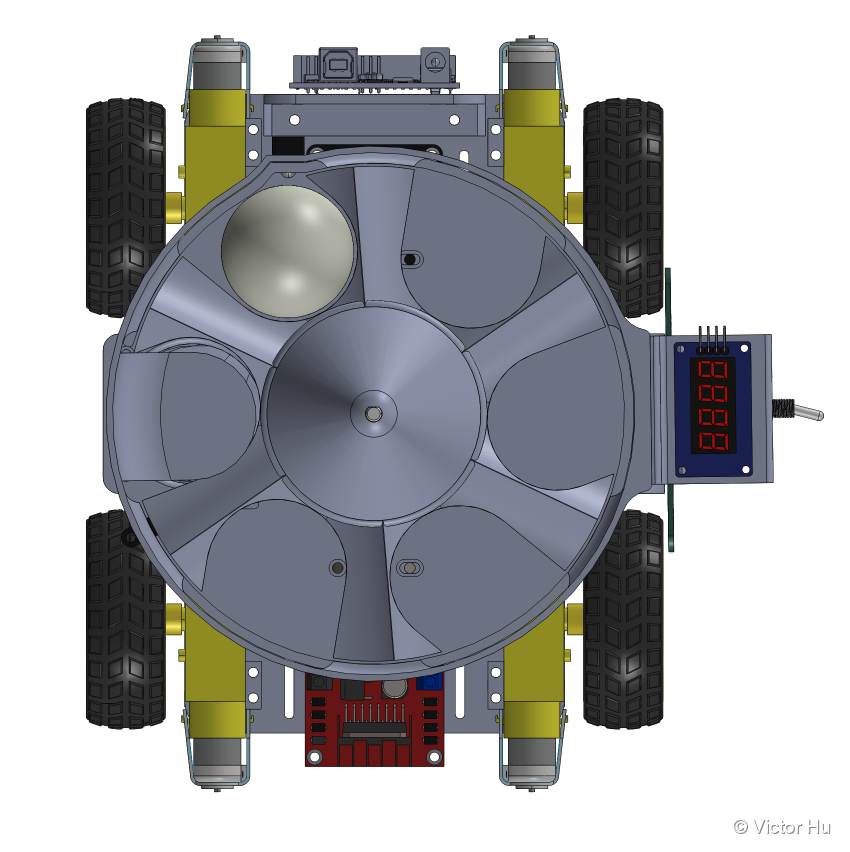
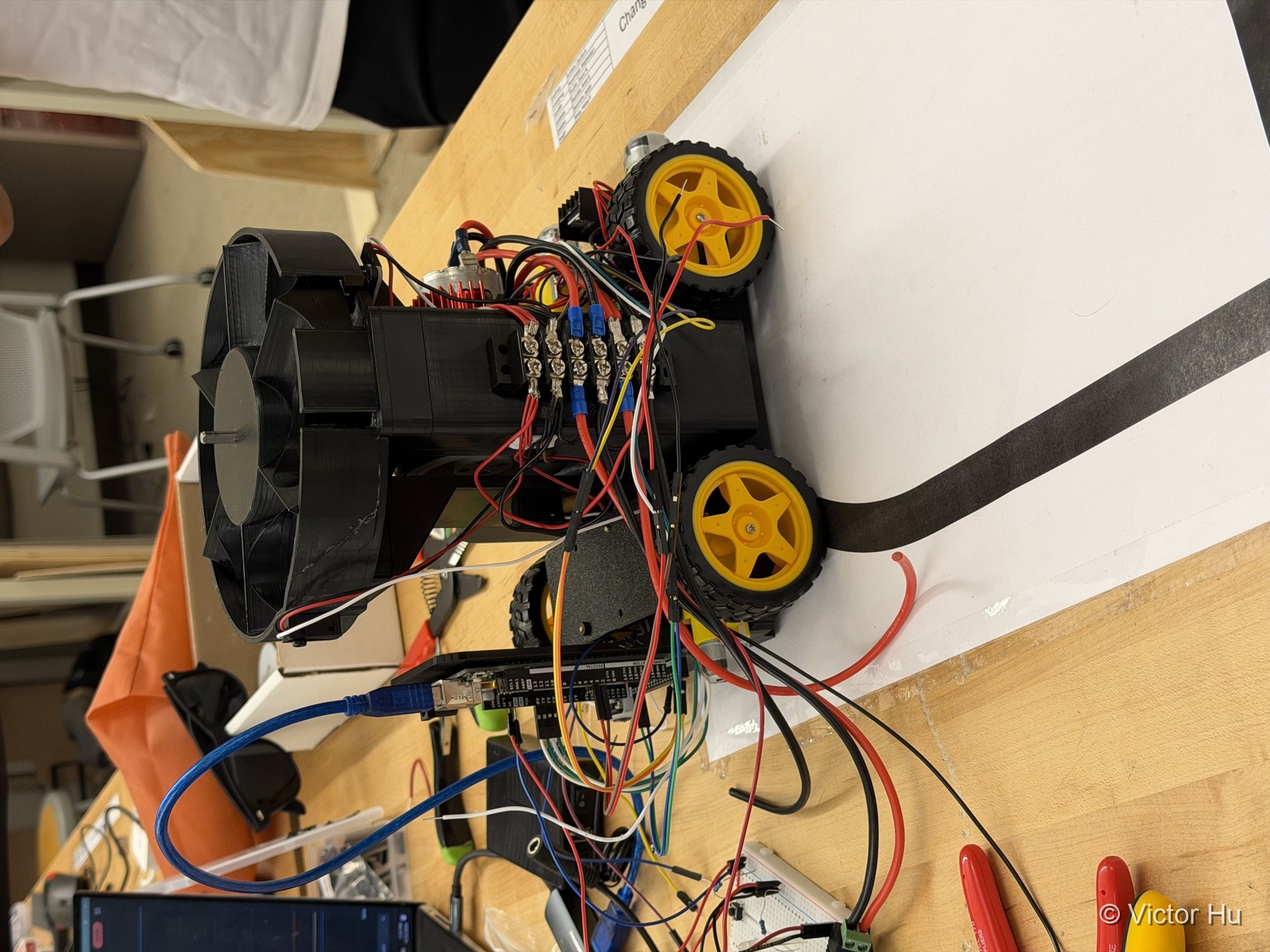
The capstone build for my Mechatronics course: a fully autonomous robot that finds its target and lands balls in a goal hill, with no operator in the loop. I led system integration, the part where the mechanical, electrical, and control subsystems either work together or fall apart.
That meant owning three things at once: the finite state machine that sequences the robot’s behavior, the circuit design that powers and wires the actuators and sensors, and the mechanism design for the chassis and launcher.
The heart of the scoring system is a flywheel launcher. I drove it with PWM and closed a PI speed loop around it so the wheel holds a commanded RPM regardless of load, which is what makes shot distance consistent enough to land in the target within tolerance, shot after shot. The robot earned an A+ and advanced to the final four of the course competition.
Highlights
- Led system integration: finite-state-machine logic, circuit design, and mechanism design
- Designed a flywheel launcher with PWM drive and PI speed control for repeatable shots
- Landed balls in the target hill within tolerance, fully autonomously
- Earned an A+ and advanced to the course's final four