
ROS2 6-Axis Robot Arm Control

Project Information
- Category: ROS2 · Motion Planning
- Role: Coursework · Solo
- Date: 2025
Tech Stack
ROS2RVizPythonPath PlanningTrajectory GenerationForward/Inverse Kinematics
ROS2 6-Axis Robot Arm Control
A hands-on ROS2 project built around a 6-axis manipulator. I modeled and controlled the arm in simulation, using RViz to visualize joint states and the planned end-effector path before anything moved.
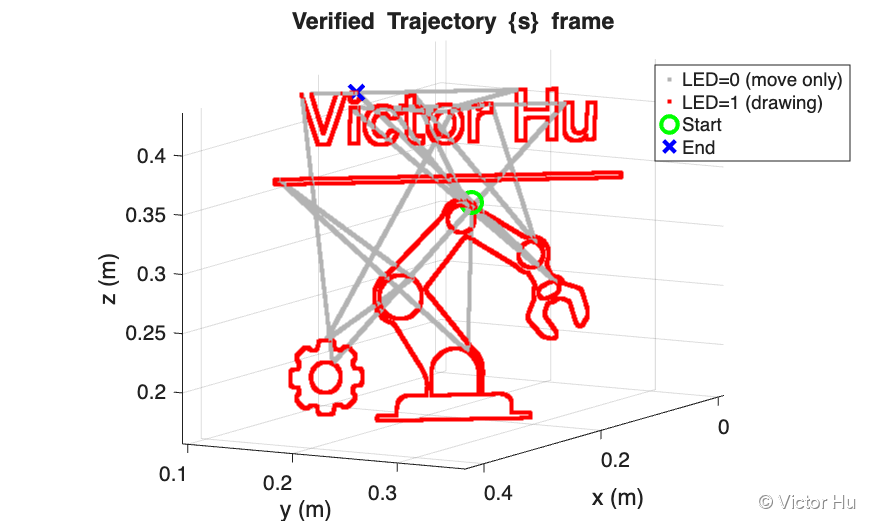
The core of the work was the motion stack: Python nodes that take a target path, solve for the joint trajectories, and stream them to the controller. To prove the pipeline end-to-end, I drove the arm through drawing tasks, following Cartesian paths accurately enough to trace shapes, which exercises kinematics, planning, and timing together rather than in isolation.
Highlights
- Simulated and controlled a 6-axis robotic arm in ROS2 with RViz visualization
- Wrote Python nodes for path planning and trajectory generation
- Executed complex drawing tasks end-to-end from plan to motion